Home
Home Download
Download News
News Mastodon
Mastodon Bluesky
Bluesky X
X Summary - 17 Years
Summary - 17 Years Summary - 16 Years
Summary - 16 Years Summary - 15 Years
Summary - 15 Years Summary - 13 Years
Summary - 13 Years Summary - 11 Years
Summary - 11 Years Summary - 10 Years
Summary - 10 Years Resources
Resources Technical Reference
Technical Reference Scripting Tutorial
Scripting Tutorial Video Tutorials
Video Tutorials Wiki Pages
Wiki Pages Image Gallery
Image Gallery Color Presets
Color Presets Using libgmic
Using libgmic G'MIC Online
G'MIC Online Community
Community Discussion Forum (Pixls.us)
Discussion Forum (Pixls.us) GimpChat
GimpChat IRC
IRC Report Issue
Report Issue| Table of Contents ▸ List of Commands ▸ Features Extraction ▸ minimal_path | ◀ min_patch | mse ▶ |
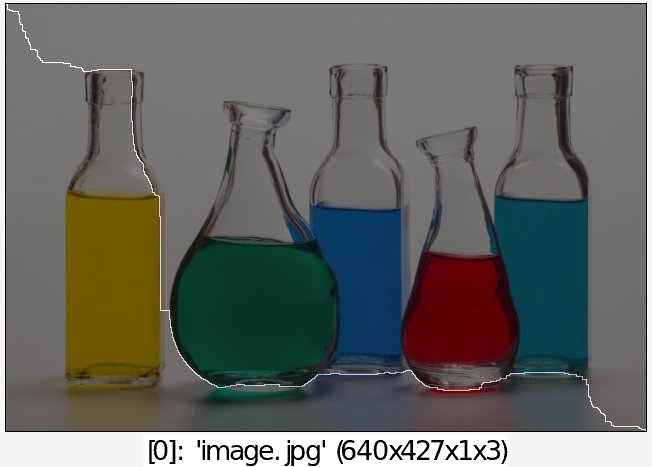
minimal_path
Arguments:
- x0[%]>=0,y0[%]>=0,z0[%]>=0,x1[%]>=0,y1[%]>=0,z1[%]>=0,_is_high_connectivity={ 0:No | 1:Yes }
Description:
Compute minimal path between two points on selected potential maps.Default values:
is_high_connectivity=0.
Example of use:
image.jpg +gradient_norm fill[-1] 1/(1+i) minimal_path[-1] 0,0,0,100%,100%,0 pointcloud[-1] 0 *[-1] 280 to_rgb[-1] ri[-1] [-2],0 or
{kind=link}